

หลังจากจากที่ได้รู้คุณสมบัติเบื้องต้นของหุ่นยนต์จากตอนที่ 1 มาแล้ว ในตอนที่ 2 นี้ลองมาดูส่วนประกอบต่างๆที่ใข้เครื่องพิมพ์สามมิติในการพิมพ์ส่วนต่างๆของหุ่นยนต์กัน
จากหุ่นที่สมบูรณ์พร้อมใช้งานตามรูป
เมื่อถอดส่วนที่เป็น controller ของ AtRobt ออกมาจากหุ่นจะเป็นไปตามรูปที่แสดง
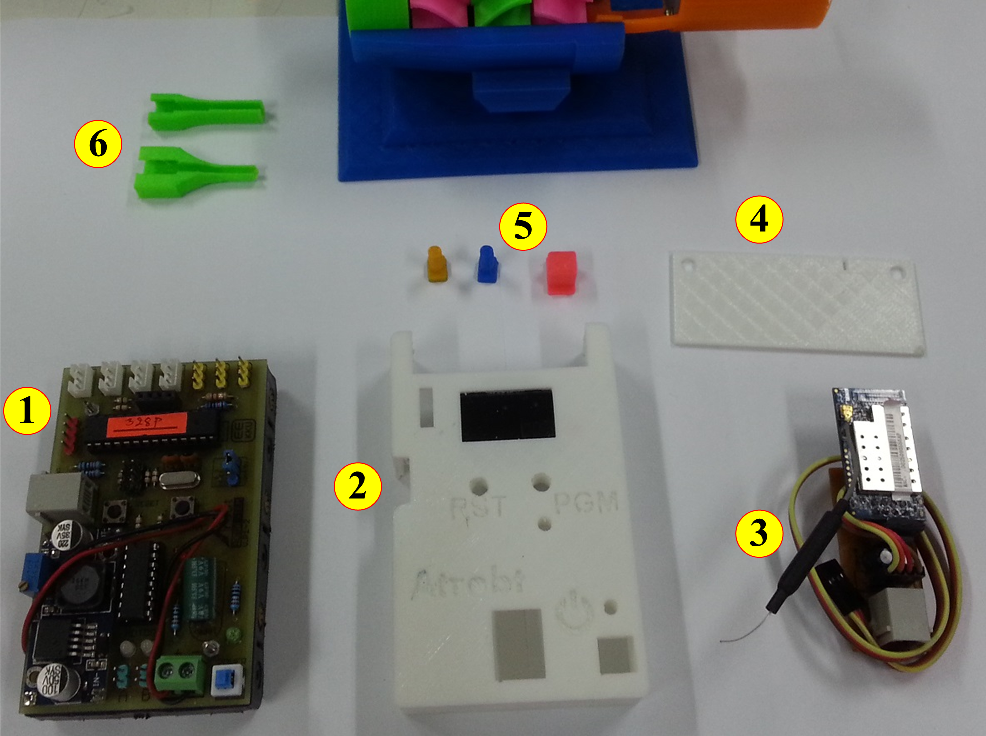
ส่วนประกอบสำหรับชุดควบคุมคือ
1. AtRobt controller ที่ใช้ microcontroller ตระกูล AVR รุ่น ATmega328 ในการควบคุมและใช้ซอฟต์แวร์ Arrow Control ที่เขียนในลักษณะ graphical programming ในการเชียน program
2.ฝาครอบชุด controller มีจอ OLED ยึดติดที่ฝา
3.ชุด WIFI module ที่เชื่อมต่อกับ AtRobt controller ได้โดยการสื่อสารแบบ serial แบบ Asynchronous ที่รู้จักกันดีในชื่อ Universal Asynchronous Receiver Transmitter (UART) ชุด WIFI module นี้ใช้ระดับแรงดันไฟฟ้าที่ 3.3V แต่ถูกออกแบบมาให้ต่อเข้ากับ Atrobt ได้โดยมีวงจรแปลง และยังสามารถต่อกับชุด USB to Serial Converter ที่ใช้ในการ program ตัว controller ได้โดยตรง ทำให้สามารตั้งค่าการทำงานของ WIFI module ได้จาก computer
4. ฝาปิดชุด WIFI module เมื่อใส่ WIFI module กับตัวหุ่น
5. ปุ่มกดที่ใข้ควบคุม AtRobt controller ใส่ไว้ระหว่าง AtRobt controller และฝาครอบ ประกอบไปด้วย ปุ่ม reset, program และ power
6. ชุดฝาครอบ iPhone ป้องกันสายหัก ยืดอายุการใช้งาน อันนี้ไม่เกี่ยวกับหุ่นยนต์ :) แต่ใข้เครื่องพิมพ์เดียวกันและมีคนสนใจเอาไปใช้งาน ก็เลยเอามาประกอบฉาก :) สนใจ click นี่เลย
สำหรับหุ่นที่ยกชุด controller และฝาครอบออกมา ก็จะมีรูปดังเช่นนี้

ส่วนที่ยึด motor และ sensor ต่างๆไว้เปรียบเสมือน chassis ของรถจะมีลักษณะตามนี้

การออกแบบชิ้นส่วนทั้งหมด ใช้ Autodesk 123D Design ในการออกแบบ

ส่วนด้านล่างของหุ่นก็จะมี IR reflectance sensor ติดไว้ดังรูป

ในคราวต่อไป มาดูการทำงานของหุ่นตัวนี้กัน










0 comments:
Post a Comment